计划器非常复杂,故本节仅描述最简单的情况,即单表查询的计划树创建过程。更复杂的查询,换而言之即多表查询,其计划树创建过程将在第3.6节中阐述。
PostgreSQL中的计划器会执行三个处理步骤:
- 执行预处理
- 在所有可能的访问路径中,找出代价最小的访问路径
- 按照代价最小的路径,创建计划树
访问路径(access path) 是估算代价时的处理单元;比如,顺序扫描,索引扫描,排序以及各种连接操作都有其对应的路径 。访问路径只在计划器创建查询计划树的时候使用。最基本的访问路径数据结构就是relation.h中定义的Path结构体。它就相当于是顺序扫描。所有其他的访问路径都基于该结构,下面会介绍细节。
计划器为了处理上述步骤,会在内部创建一个PlannerInfo数据结构。在该数据结构中包含着查询树,查询所涉及关系信息,访问路径等等。
typedef struct PathKey {
NodeTag type;
EquivalenceClass *pk_eclass; /* 值是否有序 */
Oid pk_opfamily; /* 用于定义顺序的B树操作符族 */
int pk_strategy; /* 排序方向(ASC or DESC) */
bool pk_nulls_first; /* NULL是否排序在常规值之前? */
} PathKey;
typedef struct Path {
NodeTag type;
NodeTag pathtype; /* 标识 scan/join 方法的标签 */
RelOptInfo *parent; /* 路径所基于的关系 */
PathTarget *pathtarget; /* Vars/Exprs的列表, 代价, 宽度 */
ParamPathInfo *param_info; /* 参数化信息, 如果没有则为NULL */
bool parallel_aware; /* 涉及到并行相关的逻辑? */
bool parallel_safe; /* 是否能作为并行执行计划的一部分? */
int parallel_workers; /* 期待的并行工作进程数量; 0表示没有并行 */
/* 估计路径的尺寸或代价 (更多详情参考costsize.c) */
double rows; /* 预估结果元组数目 */
Cost startup_cost; /* 获取任何元组前需要花费的代价 */
Cost total_cost; /* 总代价 (假设获取所有元组所需代价) */
List *pathkeys; /* 路径输出的排序顺序 */
/* pathkeys 是PathKey节点的列表,PathKey定义见上面 */
} Path;
typedef struct PlannerInfo {
NodeTag type;
Query *parse; /* 被计划的查询 */
PlannerGlobal *glob; /* 当前计划器运行时的全局信息 */
Index query_level; /* 最外层查询为1 */
struct PlannerInfo *parent_root; /* 最外层查询为NULL */
/* plan_params包含着当前计划中的查询层次需要对低层查询暴露的表达式。
* outer_params包含着PARAM_EXEC参数中的paramId列表,这些参数是外
* 部查询层次对当前查询层次所暴露的。*/
List *plan_params; /* PlannerParamItems的列表, 见下 */
Bitmapset *outer_params;
/* simple_rel_array 持有着指向“基础关系”与“其他关系”的指针 (详情参考
* RelOptInfo的注释)。它由rangetable index所索引(因此第0项总是废值)。
* 当RTE并不与基础关系相对应,譬如连接的RTE,或未引用的视图RTE,或该
* RelOptInfo还没有产生时,里面的项目可能为NULL。*/
struct RelOptInfo **simple_rel_array; /* 所有单个关系的RelOptInfos */
int simple_rel_array_size; /* 数组分配的大小 */
/* simple_rte_array 与simple_rel_array 长度相同,且持有指向关联范围表项的指针。
* 这使得我们能避免执行rt_fetch(), 当需要展开很大的继承集时会很慢。 */
RangeTblEntry **simple_rte_array; /* rangetable的数组 */
/* all_baserels是所有查询所涉及基本关系的关系ID列表(但不含“其他关系”的ID)
* 也就是说,最终连接时,所需构建的关系标识符。该字段是由make_one_rel计算的。
* 计算发生于计算Paths之前。*/
Relids all_baserels;
/* nullable_baserels 是在进行外连接的jointree中那些可空的基础关系的ID集合。
* 这些关系可能在WHERE子句,SELECT目标列表或其他地方产生空值。该字段由函数
* deconstruct_jointree负责计算。*/
Relids nullable_baserels;
/* join_rel_list是一个列表,在计划过程中连接关系的RelOptInfos都放在这里。
* 对于比较小的问题,我们只是简单的扫过这个列表来完成查找。但当连接很多关系时,
* 我们会使用散列表来加速查询。散列表当且仅当join_rel_hash不为空时存在且
* 有效。注意即使用散列表查找时,我们依然会维护列表,这会简化GEQO的相关问题。*/
List *join_rel_list; /* 连接关系的RelOptInfos */
struct HTAB *join_rel_hash; /* 连接关系的散列表,可选 */
/* 当使用动态规划进行连接搜索时,join_rel_level[k]是第k层的连接关系RelOptInfos列表。
* 新的连接关系RelOptInfos会自动添加到join_rel_level[join_cur_level]中,
* 而join_cur_level为当前层级。如果没用到动态规划,join_rel_level则为空。*/
List **join_rel_level; /* 连接关系RelOptInfo的列表 */
int join_cur_level; /* 待追加列表的序号 */
List *init_plans; /* 查询的初始SubPlans */
List *cte_plan_ids; /* 子计划的ID列表,每个CTE对应一个 */
List *multiexpr_params; /* MULTIEXPR子查询输出用到的双层嵌套参数列表 */
List *eq_classes; /* 活跃的EquivalenceClasses列表 */
List *canon_pathkeys; /* "标准" PathKeys 的列表 */
List *left_join_clauses; /* RestrictInfos列表,用于左连接子句 */
List *right_join_clauses; /* RestrictInfos列表,用于右连接子句 */
List *full_join_clauses; /* RestrictInfos列表,用于完全连接子句 */
List *join_info_list; /* SpecialJoinInfos 的列表 */
List *append_rel_list; /* AppendRelInfos 的列表 */
List *rowMarks; /* PlanRowMarks 的列表 */
List *placeholder_list; /* PlaceHolderInfos 的列表 */
List *fkey_list; /* ForeignKeyOptInfos 的列表 */
List *query_pathkeys; /* query_planner()期望的pathkeys */
List *group_pathkeys; /* groupClause的pathkeys, 如果有的话 */
List *window_pathkeys; /* 底部窗口的pathkeys, 如果有的话 */
List *distinct_pathkeys; /* distinctClause的pathkeys, 如果有的话 */
List *sort_pathkeys; /* sortClause的pathkeys, 如果有的话 */
List *initial_rels; /* 我们现在正在尝试连接的RelOptInfos */
/* 使用fetch_upper_rel()来获取任意特定的上层关系 */
List *upper_rels[UPPERREL_FINAL + 1]; /* upper-rel RelOptInfos */
/* grouping_planner针对上层处理过程选择的目标列表 */
struct PathTarget *upper_targets[UPPERREL_FINAL + 1];
/* grouping_planner会将最终处理过后的targetlist回传至此。在最终计划最顶层的目标列表中会用到 */
List *processed_tlist;
/* create_plan()期间填充的字段,定义于setrefs.c */
AttrNumber *grouping_map; /* 针对GroupingFunc的修补 */
List *minmax_aggs; /* MinMaxAggInfos列表 */
MemoryContext planner_cxt; /* 持有PlannerInfo的上下文 */
double total_table_pages; /* 查询涉及到所有表的页面总数 */
double tuple_fraction; /* 传递给查询计划器的tuple_fraction */
double limit_tuples; /* 传递给查询计划器的limit_tuples */
bool hasInheritedTarget; /* 若parse->resultRelation为继承的子关系则为真 */
bool hasJoinRTEs; /* 如果任意RTEs为RTE_JOIN类别则为真 */
bool hasLateralRTEs; /* 如果任意RTEs被标记为LATERAL则为真 */
bool hasDeletedRTEs; /* 如果任意RTEs从连接树中被删除则为真 */
bool hasHavingQual; /* 如果havingQual非空则为真 */
bool hasPseudoConstantQuals; /* 如果任意RestrictInfo包含
pseudoconstant = true则为真 */
bool hasRecursion; /* 如果计划中包含递归WITH项则为真 */
/* 当hasRecursion为真时,会使用以下字段: */
int wt_param_id; /* 工作表上PARAM_EXEC的ID */
struct Path *non_recursive_path; /* 非递归项的路径 */
/* 这些字段是createplan.c的工作变量 */
Relids curOuterRels; /* 当前节点外部的关系 */
List *curOuterParams; /* 尚未赋值的NestLoopParams */
/* 可选的join_search_hook私有数据, 例如, GEQO */
void *join_search_private;
} PlannerInfo;
本节会通过一个具体的例子,来描述如何基于查询树创建计划树。
3.3.1 预处理
在创建计划树之前,计划器对先PlannerInfo中的查询树进行一些预处理。
预处理有很多步骤,本节只讨论和单表查询处理相关的主要步骤。其他预处理操作将在3.6节中描述。
- 简化目标列表(target list) ,
LIMIT子句等; 例如,表达式2+2会被重写为4,这是由clauses.c中eval_const_expressions()函数负责的。 - 布尔表达式的规范化
例如,
NOT(NOT a)会被重写为a - 压平与/或表达式
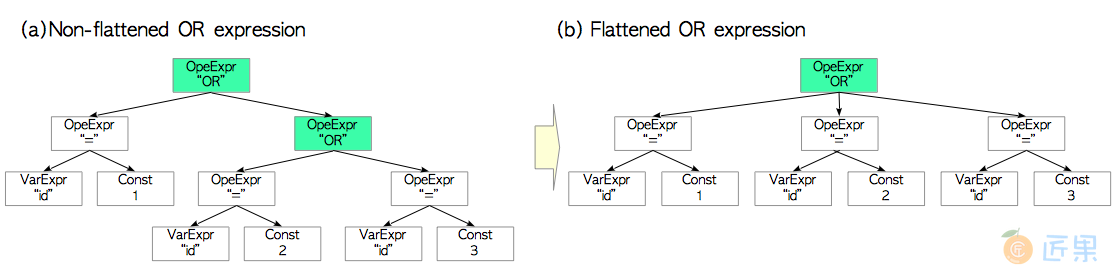
SQL标准中的AND/OR是二元操作符;但在PostgreSQL内部它们是多元操作符。而计划器总是会假设所有的嵌套AND/OR都应当被压平。
这里有一个具体的例子。考虑这样一个布尔表达式
(id = 1) OR (id = 2) OR (id = 3),图3.9(a) 展示了使用二元表达式时的查询树,预处理会将这些二元算子简化压平为一个三元算子,如图3.9(b)所示。 图3.9. 压平布尔表达式的例子
3.3.2 找出代价最小的访问路径
计划器对所有可能的访问路径进行代价估计,然后选择代价最小的那个。具体来说,计划器会执行以下几个步骤:
- 创建一个
RelOptInfo数据结构,存储访问路径及其代价。RelOptInfo结构体是通过make_one_rel()函数创建的,并存储于PlannerInfo结构体的simple_rel_array字段中,如图3.10所示。在初始状态时RelOptInfo持有着baserestrictinfo变量,如果存在相应索引,还会持有indexlist变量。baserestrictinfo存储着查询的WHERE子句,而indexlist存储着目标表上相关的索引。typedef enum RelOptKind { RELOPT_BASEREL, RELOPT_JOINREL, RELOPT_OTHER_MEMBER_REL, RELOPT_UPPER_REL, RELOPT_DEADREL } RelOptKind; typedef struct RelOptInfo { NodeTag type; RelOptKind reloptkind; /* 本RelOptInfo包含的所有关系 */ Relids relids; /* 基本关系的ID集合 (范围表索引) */ /* 由计划器生成的预估尺寸 */ double rows; /* 预估结果元组数目 */ /* 计划器标记位,每个关系一份 */ bool consider_startup; /* 保留启动代价最低的路径? */ bool consider_param_startup; /* 同上, 针对参数化路径? */ bool consider_parallel; /* 考虑并行路径? */ /* 扫描当前关系的默认结果目标列表 */ struct PathTarget *reltarget; /* Vars/Exprs, 代价, 宽度的列表 */ /* 物化相关信息 */ List *pathlist; /* Path 结构体列表 */ List *ppilist; /* pathlist中使用的ParamPathInfos */ List *partial_pathlist; /* 部分路径 */ struct Path *cheapest_startup_path; struct Path *cheapest_total_path; struct Path *cheapest_unique_path; List *cheapest_parameterized_paths; /* 基础关系与连接关系都需要的 参数化信息 */ /* (参见 lateral_vars 与 lateral_referencers) */ Relids direct_lateral_relids; /* 直接以LATERAL方式引用的关系 */ Relids lateral_relids; /* 关于基础关系的信息 (连接关系不会设置这些字段!) */ Index relid; Oid reltablespace; /* 表空间 */ RTEKind rtekind; /* RELATION, SUBQUERY, 或 FUNCTION */ AttrNumber min_attr; /* 关系属性的最小值 (通常<0) */ AttrNumber max_attr; /* 关系属性的最大值 */ Relids *attr_needed; /* 被索引的数组 [min_attr .. max_attr] */ int32 *attr_widths; /* 被索引的数组 [min_attr .. max_attr] */ List *lateral_vars; /* 关系所引用的LATERAL Vars 与 PHVs */ Relids lateral_referencers;/* 侧面引用本表的关系 */ List *indexlist; /* IndexOptInfo列表 */ BlockNumber pages; /* 来自pg_class的页面数估计值 */ double tuples; double allvisfrac; PlannerInfo *subroot; /* 如有子查询 */ List *subplan_params; /* 如有子查询 */ int rel_parallel_workers; /* 期望的并行工作进程数量 */ /* 有关外部表与外部表连接的相关信息 */ Oid serverid; /* 外部表与外部表连接相应的服务器ID */ Oid userid; /* 用于检查访问权限的用户标识 */ bool useridiscurrent;/* 当前用户是否能合法进行JOIN */ struct FdwRoutine *fdwroutine; void *fdw_private; /* 被各种扫描与连接所使用 */ List *baserestrictinfo; /* RestrictInfo结构体列表 (如果存在基础关系) */ QualCost baserestrictcost; /* 求值上述限制条件的代价 */ List *joininfo; /* RestrictInfo 结构体列表,涉及到本表的连接会用到 */ bool has_eclass_joins; /* T 意味着joininfo不完整 */ } RelOptInfo; - 估计所有可能访问路径的代价,并将访问路径添加至
RelOptInfo结构中。 这一处理过程的细节如下:- 创建一条路径,估计该路径中顺序扫描的代价,并将其写入路径中。将该路径添加到
RelOptInfo结构的pathlist变量中。 - 如果目标表上存在相关的索引,则为每个索引创建相应的索引访问路径。估计所有索引扫描的代价,并将代价写入相应路径中。然后将索引访问路径添加到
pathlist变量中。 - 如果可以进行位图扫描,则创建一条位图扫描访问路径。估计所有的位图扫描的代价,并将代价写入到路径中。然后将位图扫描路径添加到
pathlist变量中。
- 创建一条路径,估计该路径中顺序扫描的代价,并将其写入路径中。将该路径添加到
- 从
RelOptInfo的pathlist中,找出代价最小的访问路径。 - 如有必要,估计
LIMIT,ORDER BY和AGGREGATE操作的代价。
为了更加清晰的理解计划器的执行过程,下面给出了两个具体的例子。
3.3.2.1 例1
首先来研究一个不带索引的简单单表查询;该查询同时包含WHERE和ORDER BY子句。
testdb=# \d tbl_1
Table "public.tbl_1"
Column | Type | Modifiers
--------+---------+-----------
id | integer |
data | integer |
testdb=# SELECT * FROM tbl_1 WHERE id < 300 ORDER BY data;
图3.10和图3.11展示了本例中计划器的处理过程。
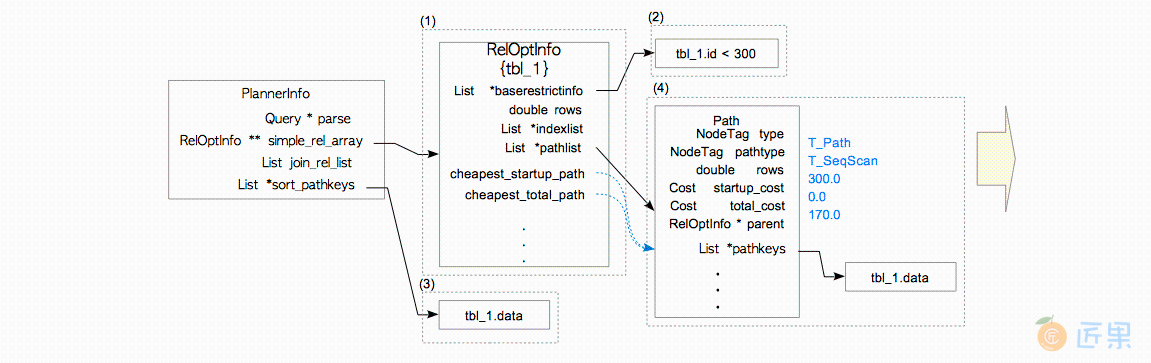
- 创建一个
RelOptInfo结构,将其保存在PlannerInfo结构的simple_rel_array字段中。 - 在
RelOptInfo结构的baserestrictinfo字段中,添加一条WHERE子句。WHERE子句id<300会经由initsplan.c中定义的distribute_restrictinfo_to_rels()函数,添加至列表变量baserestrictinfo中。另外由于目标表上没有相关索引,RelOptInfo的indexlist字段为空。 - 为了满足排序要求,
planner.c中的standard_qp_callback()函数会在PlannerInfo的sor_pathkeys字段中添加一个pathkey。Pathkey是表示路径排序顺序的数据结构。本例因为查询包含一条ORDER BY子句,且该子句中的列为data,故data会被包装为pathkey,放入列表变量sort_pathkeys中。 - 创建一个
Path结构,并使用cost_seqscan函数估计顺序扫描的代价,并将代价写入Path中。然后使用pathnode.c中定义的add_path()函数,将该路径添加至RelOptInfo中。 如之前所提到过的,Path中同时包含启动代价和总代价,都是由cost_seqscan函数所估计的。
在本例中,因为目标表上没有索引,计划器只估计了顺序扫描的代价,因此最小代价是自动确定的。
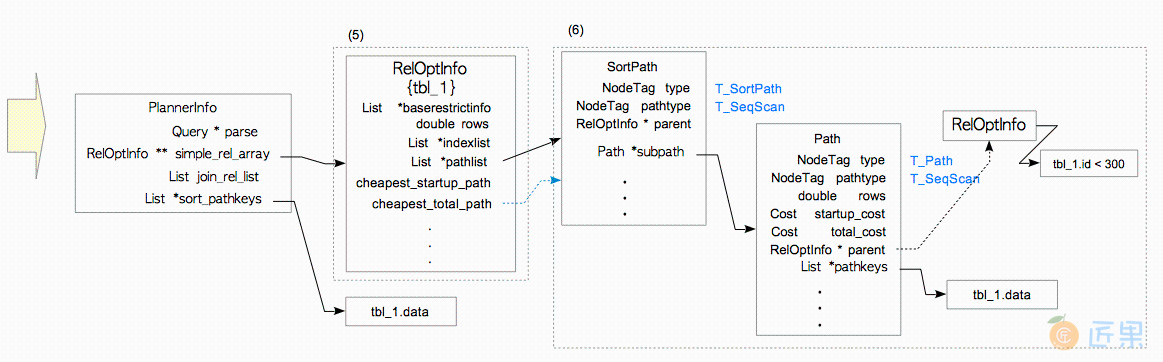
- 创建一个新的
RelOptInfo结构,用于处理ORDER BY子句。 注意新的RelOptInfo没有baserestrictinfo字段,该信息已经被WHERE子句所持有。 - 创建一个排序路径,并添加到新的
RelOptInfo中;然后让SortPath的subpath字段指向顺序扫描的路径。typedef struct SortPath { Path path; Path *subpath; /* 代表输入来源的子路径 */ } SortPath;SortPath结构包含两个Path结构:path与subpath;path中存储了排序算子本身的相关信息,而subpath则指向之前得到的代价最小的路径。 注意顺序扫描路径中parent字段,该字段指向之前的RelOptInfo结构体(也就是在baserestrictinfo中存储着WHERE子句的那个RelOptInfo)。因此在下一步创建计划树的过程中,尽管新的RelOptInfo结构并未包含baserestrictinfo,但计划器可以创建一个包含Filter的顺序扫描节点,将WHERE子句作为过滤条件。
这里已经获得了代价最小的访问路径,然后就可以基于此生成一颗计划树。3.3.3节描述了相关的细节。
3.3.2.2 例2
下面我们将研究另一个单表查询的例子,这一次表上有两个索引,而查询带有一个WHERE子句。
testdb=# \d tbl_2
Table "public.tbl_2"
Column | Type | Modifiers
--------+---------+-----------
id | integer | not null
data | integer |
Indexes:
"tbl_2_pkey" PRIMARY KEY, btree (id)
"tbl_2_data_idx" btree (data)
testdb=# SELECT * FROM tbl_2 WHERE id < 240;
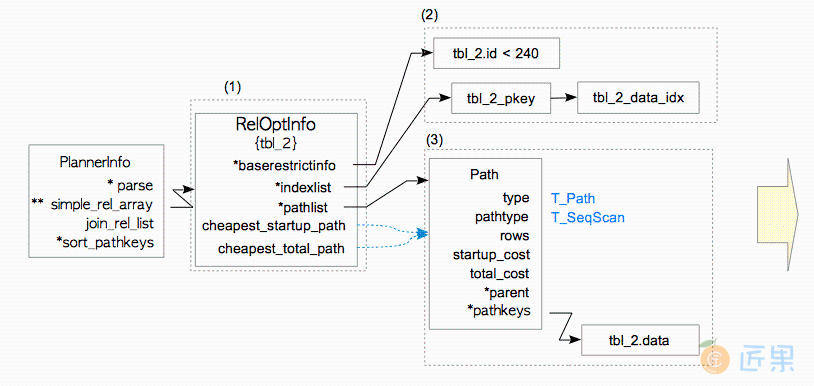
图3.12到3.14展示了本例中计划器的处理过程。
- 创建一个
RelOptInfo结构体 - 在
baserestrictinfo中添加一个WHERE子句;并将目标表上的索引(们)添加到indexlist中。 在本例中,WHERE子句'id <240'会被添加至baserestrictinfo中,而两个索引:tbl_2_pkey和tbl_2_data_idx会被添加至RelOptInfo的列表变量indexlist中。 - 创建一条路径,估计其顺序扫描代价,并添加到
RelOptInfo的pathlist中。
typedef struct IndexPath
{
Path path;
IndexOptInfo *indexinfo;
List *indexclauses;
List *indexquals;
List *indexqualcols;
List *indexorderbys;
List *indexorderbycols;
ScanDirection indexscandir;
Cost indextotalcost;
Selectivity indexselectivity;
} IndexPath;
/*
* IndexOptInfo
* 用于计划/优化的信息,每个索引对应一个。
*
* indexkeys[], indexcollations[], opfamily[], 以及 opcintype[]
* 每个字段都有 ncolumns 个项.
*
* sortopfamily[], reverse_sort[], 以及 nulls_first[] 类似,也都有
* ncolumns 个项, 当且仅当该索引是有序的,否则这些指针都为空。
*
* indexkeys[] 数组中的零值表示该索引列是一个表达式,而每个这种列在indexprs
* 中都会有一个对应的元素。
*
* 对于有序索引,reverse_sort[] 以及 nulls_first[] 描述了正向索引扫描时
* 索引的排序顺序。当进行反向索引扫描时,就会产生相反的顺序。
*
* indexprs 与 indpred 会通过prepqual.c 中的 eval_const_expressions()
* 用于简单地与WHERE子句匹配,indpred使用简单的合取范式。
*
* indextlist 是 TargetEntry的列表,标识着索引建在哪些列上。对于简单的列,
* 它会提供基本关系中与之对应的Var,对于表达式列,它还会指向indexprs对应元素。
* 相对应的Var。
*
* 当IndexOptInfo创建时,这里大多数字段都会被填充 (plancat.c),但indrestrictinfo
* 与predOK会在稍后通过check_index_predicates()设置。
*/
typedef struct IndexOptInfo
{
NodeTag type;
Oid indexoid; /* 索引关系的OID */
Oid reltablespace; /* 索引所属的表空间 (不是表) */
RelOptInfo *rel; /* 索引对应的表,反向链接 */
/* 索引尺寸的统计 (来自pg_class和其他地方) */
BlockNumber pages; /* 索引中的磁盘页面数 */
double tuples; /* 索引中的元组数量 */
int tree_height; /* 索引树的高度,未知则为 -1 */
/* 索引描述符信息 */
int ncolumns; /* 索引中列的数量 */
int *indexkeys; /* 索引中列的序号,或者0 */
Oid *indexcollations; /* 索引列上排序规则的OID */
Oid *opfamily; /* 列上运算符族的OID */
Oid *opcintype; /* 运算符族输入数据类型的OID */
Oid *sortopfamily; /* 如果这些列有序,B树算子族的OID */
bool *reverse_sort; /* 排序顺序是反向降序的吗? */
bool *nulls_first; /* 排序顺序中,空值是排在最前面的吗? */
bool *canreturn; /* 在仅索引扫描中,哪些索引列可以被返回? */
Oid relam; /* 访问方法的OID (在 pg_am 中) */
List *indexprs; /* 非平凡的索引列,即表达式 */
List *indpred; /* 如果是部分索引,则为谓词,否则为空 */
List *indextlist; /* 表示索引列的目标列表 */
List *indrestrictinfo; /* 父关系的baserestrictinfo列表 */
bool predOK; /* 如果查询与索引谓词匹配则为真 */
bool unique; /* 唯一索引则为真 */
bool immediate; /* 唯一约束是否是立即强制实施的? */
bool hypothetical; /* 如果索引并非真实存在则为真。 */
/* 剩下这些字段是从索引访问方法的API结构里复制过来的 */
bool amcanorderbyop; /* 访问方法是否支持按算子结果排序? */
bool amoptionalkey; /* 查询是否可以忽略第一列中的键? */
bool amsearcharray; /* 访问方法是否能处理ScalarArrayOpExpr限定条件? */
bool amsearchnulls; /* 访问方法是否能搜索空项或非空项? */
bool amhasgettuple; /* 访问方法是否有amgettuple接口? */
bool amhasgetbitmap; /* 访问方法是否有amgetbitmap接口? */
/* 相比include amapi.h,我们直接在这里用这种方式声明 amcostestimate */
void (*amcostestimate) (); /* 访问方法的代价估计器 */
} IndexOptInfo;
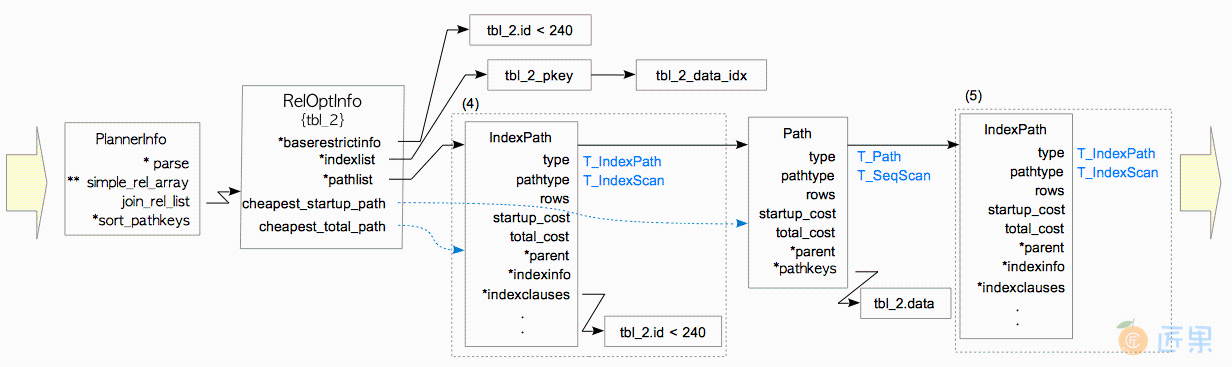
- 创建一个
IndexPath,估计索引扫描的代价,并通过add_path()函数将IndexPath添加到RelOptInfo的pathlist中。 在本例中有两个索引:tbl_2_pkey与tbl_2_data_index,这些索引会按先后顺序依次处理。 一条针对tbl_2_pkey的IndexPath会先被创建出来,并进行启动代价与总代价的评估。在本例中,tbl_2_pkey是id列上的索引,而WHERE子句也包含该id列;因此WHERE子句会被存储在IndexPath的indexclauses字段中。 - 创建另一个
IndexPath,估计另一种索引扫描的代价,并将该IndexPath添加到RelOptInfo的pathlist中。 接下来,与tbl_2_data_idx相应的IndexPath会被创建出来,并进行代价估计。本例中tbl_2_data_idx并没有相关的WHERE子句;因此其indexclauses为空。
注意
add_path()函数并不总是真的会将路径添加到路径列表中。这一操作相当复杂,故这里就省去了具体描述。详细细节可以参考add_path()函数的注释。
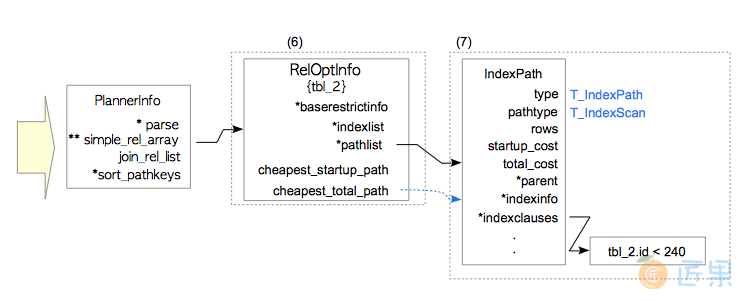
- 创建一个新的
RelOptInfo结构 - 将代价最小的路径,添加到新
RelOptInfo的pathlist中。 本例中代价最小的路径是使用tbl_2_pkey的索引路径;故将该路径添加到新的RelOptInfo中。
3.3.3 创建计划树
在最后一步中,计划器按照代价最小的路径生成一颗计划树。
计划树的根节点是定义在plannodes.h中的PlannedStmt结构,包含19个字段,其中有4个代表性字段:
- **
commandType**存储操作的类型,诸如SELECT,UPDATE和INSERT。 - **
rtable**存储范围表的列表(RangeTblEntry的列表)。 - **
relationOids**存储与查询相关表的oid。 - **
plantree**存储着一颗由计划节点组成的计划树,每个计划节点对应着一种特定操作,诸如顺序扫描,排序和索引扫描。
/* ----------------
* PlannedStmt 节点
* 计划器的输出是一颗计划树,PlannedStmt是计划树的根节点。
* PlannedStmt存储着执行器所需的“一次性”信息。
* ----------------*/
typedef struct PlannedStmt
{
NodeTag type;
CmdType commandType; /* 增|删|改|查 */
uint32 queryId; /* 查询标识符 (复制自Query) */
bool hasReturning; /* 增|删|改是否带有RETURNING? */
bool hasModifyingCTE; /* WITH子句中是否出现了增|删|改? */
bool canSetTag; /* 我是否设置了命令结果标记? */
bool transientPlan; /* 当TransactionXmin变化时重新进行计划? */
bool dependsOnRole; /* 执行计划是否特定于当前的角色? */
bool parallelModeNeeded; /* 需要并行模式才能执行? */
struct Plan *planTree; /* 计划节点树 */
List *rtable; /* RangeTblEntry节点的列表 */
/* 目标关系上用于增|删|改的范围表索引 */
List *resultRelations; /* RT索引的整数列表, 或NIL */
Node *utilityStmt; /* 如为DECLARE CURSOR则非空 */
List *subplans; /* SubPlan表达式的计划树 expressions */
Bitmapset *rewindPlanIDs; /* 需要REWIND的子计划的索引序号 */
List *rowMarks; /* PlanRowMark列表 */
List *relationOids; /* 计划所依赖的关系OID列表 */
List *invalItems; /* 其他依赖,诸如PlanInvalItems */
int nParamExec; /* 使用的PARAM_EXEC参数数量 */
} PlannedStmt;
如上所述,计划树包含各式各样的计划节点。PlanNode是所有计划节点的基类,其他计划节点都会包含PlanNode结构。比如顺序扫描节点SeqScanNode,包含一个PlanNode和一个整型变量scanrelid。PlanNode包含14个字段。下面是7个代表性字段:
startup_cost和total_cost是该节点对应操作的预估代价。rows是计划器预计扫描的行数。targetlist保存了该查询树中目标项的列表。qual储存了限定条件的列表。lefttree和righttree用于添加子节点。
/* ----------------
* 计划节点(Plan Node)
*
* 所有的计划节点都"派生"自Plan结构,将其作为自己的第一个字段。这样确保了当其强制转换为Plan
* 结构时所有东西都能正常工作。(当作为通用参数传入执行器时,节点指针会很频繁地转换为Plan*)
*
* 我们从来不会真的去实例化任何Plan节点,它只是所有Plan类型节点的公共抽象父类。
* ----------------
*/
typedef struct Plan
{
NodeTag type;
/* 计划的预估执行开销 ( 详情见 costsize.c ) */
Cost startup_cost; /* 获取第一条元组前的代价 */
Cost total_cost; /* 获取所有元组的代价 */
/* 计划器对该计划步骤返回结果大小的估计 */
double plan_rows; /* 计划预期产出的行数 */
int plan_width; /* 以字节计的行宽 */
/* 并行查询所需的信息 */
bool parallel_aware; /* 是否涉及到并行逻辑? */
/* 所有计划类型的公有结构化数据 */
int plan_node_id; /* 在整个计划树范围内唯一的标识 */
List *targetlist; /* 该节点需要计算的目标列表 */
List *qual; /* 隐式合取化处理的 限制条件 列表 */
struct Plan *lefttree; /* 输入的查询树 */
struct Plan *righttree;
List *initPlan; /* Init Plan 节点 (无关子查询表达式) */
/* “参数变化驱动”的重扫描 相关的管理信息
* extParam包含着所有外部PARAM_EXEC参数的参数ID列表,这些参数会影响当前计划节点
* 及其子节点。这里不包括该节点initPlans时setParam的相关参数,但会包括其extParams
*
* allParam包含了所有extParam的参数ID列表,以及影响当前节点的参数ID。(即,
* 在initPlans中setParams的参数)。注意这里包含了*所有*会影响本节点的PARAM_EXEC参数
*/
Bitmapset *extParam;
Bitmapset *allParam;
} Plan;
/* ------------
* 扫描节点(Scan nodes)
* ----------- */
typedef unsigned int Index;
typedef struct Scan
{
Plan plan;
Index scanrelid; /* relid 是访问范围表的索引 */
} Scan;
/* ----------------
* 顺序扫描节点
* ---------------- */
typedef Scan SeqScan;
下面是两颗计划树,分别与前一小节中的两个例子对应。
3.3.3.1 例1
第一个例子是3.3.2.1节例1对应的计划树。图3.11所示的代价最小的路径,是由一个排序路径和一个顺序扫描路径组合而成。根路径是排序路径,而其子路径为顺序扫描路径。尽管这里忽略了大量细节,但是从代价最小的路径中生成计划树的过程是显而易见的。在本例中,一个 SortNode被添加到PlannedStmt结构中,而SortNode的左子树上则挂载了一个SeqScanNode,如图3.15(a)所示。
在SortNode中,左子树lefttree指向SeqScanNode。在SeqScanNode中,qual保存了WHERE子句:'id<300'。
typedef struct Sort
{
Plan plan;
int numCols; /* 排序键 列的数目 */
AttrNumber *sortColIdx; /* 它们在目标列表中的位置序号 */
Oid *sortOperators; /* 排序所赖运算符的OID */
Oid *collations; /* collation的OID */
bool *nullsFirst; /* NULLS FIRST/LAST 方向 */
} Sort;
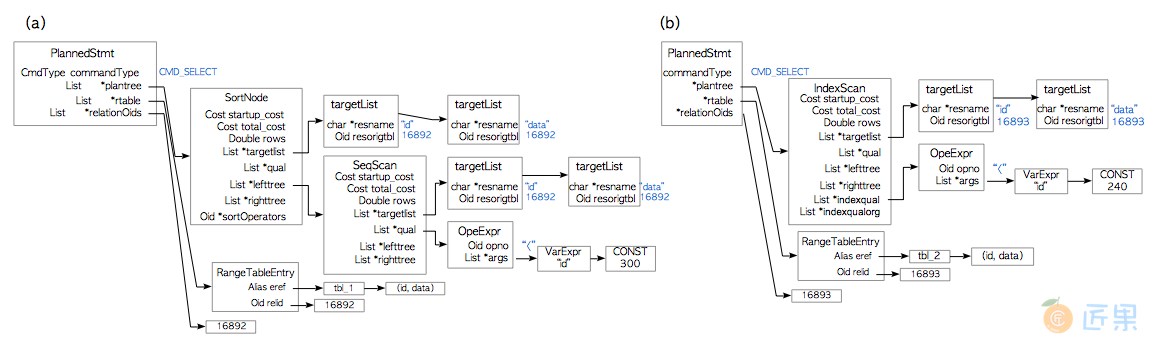
3.3.3.2 例2
第二个例子是3.3.2.2节例2对应的计划树。其代价最小的路径为索引扫描路径,如图3.14所示。因此计划树由单个IndexScanNode独立组成,如图3.15(b)所示。
在本例中,WHERE子句id < 240是一个访问谓词,它储存在IndexScanNode的indexqual字段中。
/* 索引扫描节点 */
typedef struct Scan
{
Plan plan;
Index scanrelid; /* relid 是范围表上的索引ID */
} Scan;
typedef struct IndexScan
{
Scan scan;
Oid indexid; /* 待扫描的索引OID */
List *indexqual; /* 索引限定条件的列表 (通常是OpExprs) */
List *indexqualorig; /* 同上,但使用原始形式 */
List *indexorderby; /* 索引的ORDER BY表达式 */
List *indexorderbyorig; /* 同上,但使用原始形式 */
List *indexorderbyops; /* ORDER BY表达式用到的排序运算符的OID */
ScanDirection indexorderdir; /* 正序扫描还是逆序扫描,或者根本不在乎 */
} IndexScan;